CHALLENGE: Design and build a legged robot that can reliably walk and perform more complex behaviors.
SUMMARY: Design and build an organic-style legged robot using at least eight actuators, a single-board computer, and onboard sensors, with a focus on walking gaits, physical prototyping, and system integration.
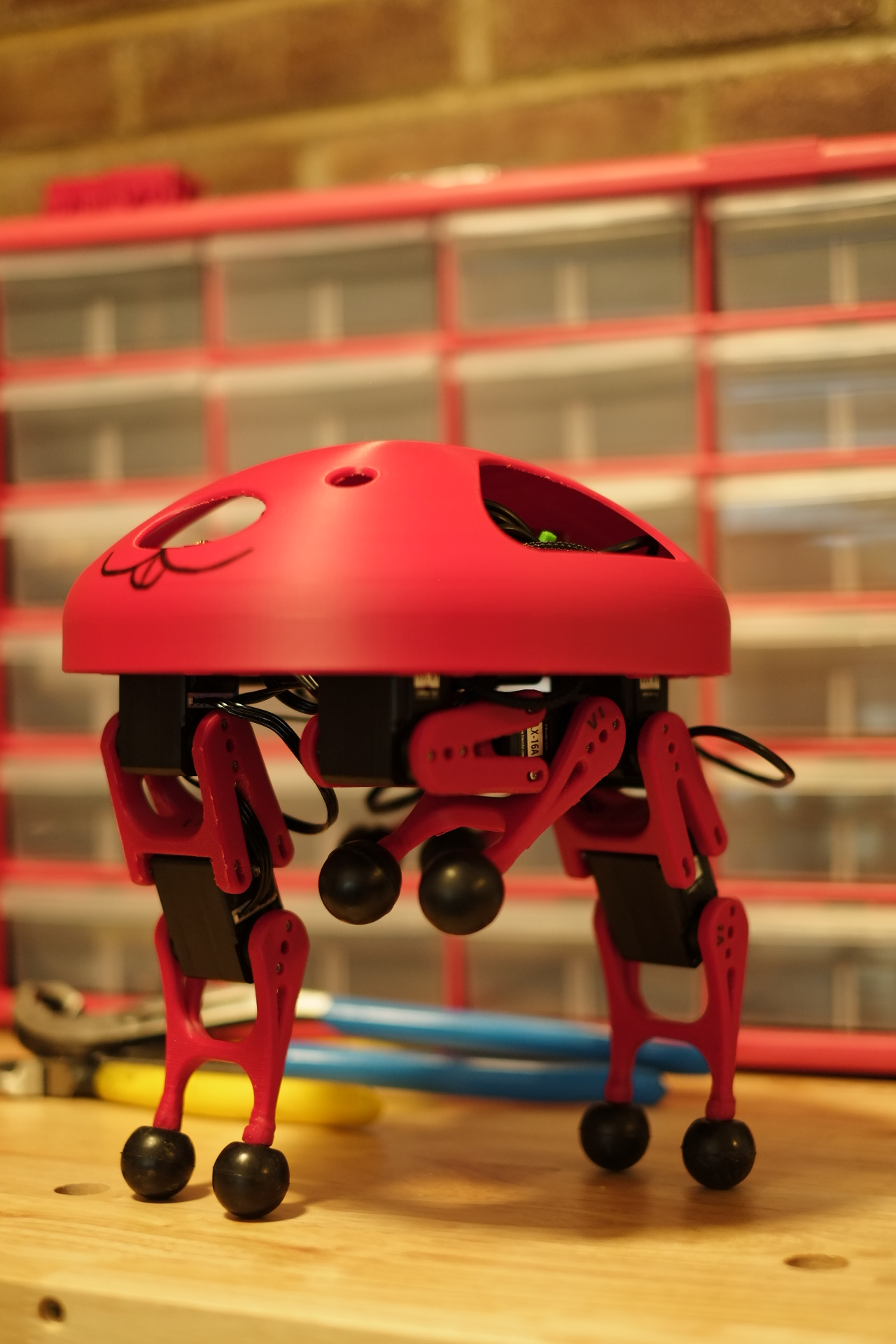
Clifford is a remote controlled quadruped robot with two degrees of freedom per leg, optimized for moving in a straight line using a Raspberry Pi and serial bus servos.
COURSE/CLIENT: ME4611 Robotics Studio, Columbia University Mechanical Engineering
COMPLETION: December 2025
SKILLS: Mechanical Design & CAD, Control Systems & Dynamics, Robot Kinematics Modeling, Embedded Systems & Electronics, Servos, Software Engineering

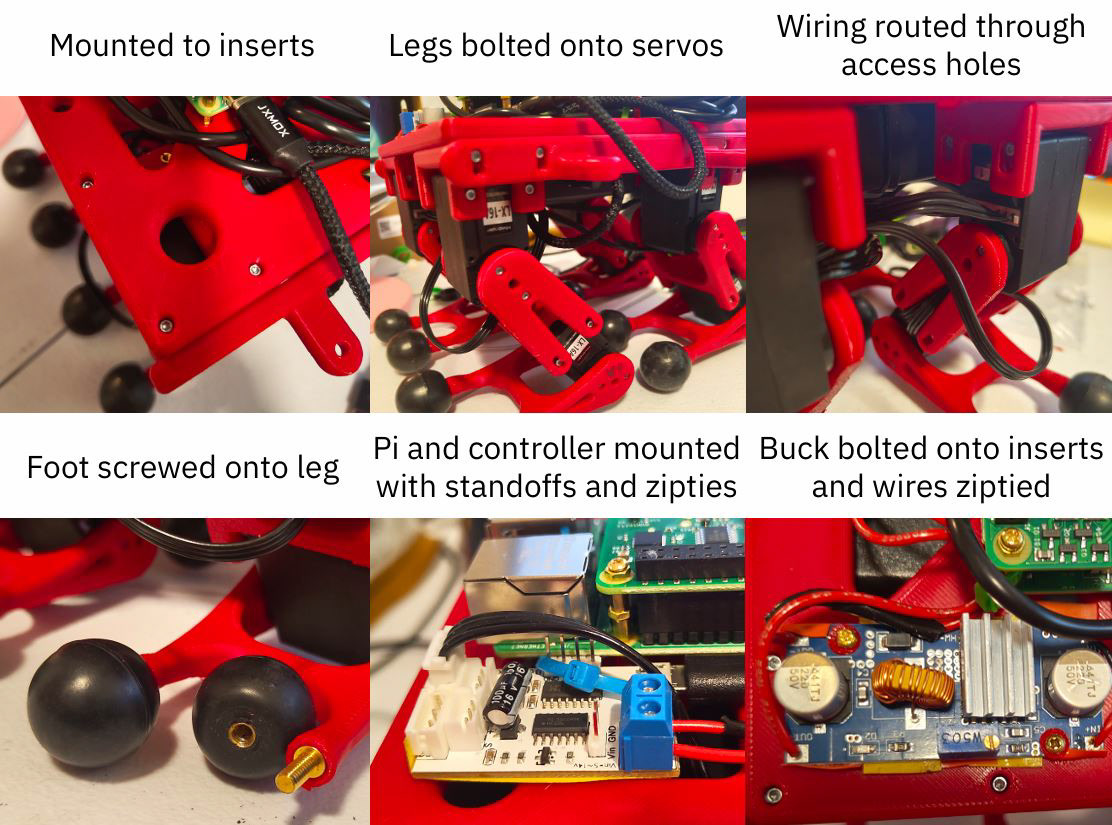
I designed Clifford to be as simple as possible, while staying within the requirements of the course. The legs are identical and the wires and electronics are easily accessible so the robot can be charged without disassembly. I had to travel during the middle of the semester, so Clifford is able to fit in a standard backpack and the battery can be easily removed for airport security.
You may view the video directly below for a short presentation of the build process from sketch to product!

"I Love Clifford the Big Red Dog," composed by Mark Mothersbaugh & Josh Mancell
I built the quadruped’s motion system around real-time inverse kinematics to control all four legs with precision. Each leg has a defined geometry and neutral position, and the IK solver computes the hip and knee angles needed to place the feet exactly where the gait engine specifies.
The robot uses a diagonal trot gait: one diagonal pair swings forward while the other provides support, and the pattern alternates each cycle to generate forward motion. During operation, the controller updates foot positions, converts them to joint angles, and sends servo commands at a steady frequency for movement.
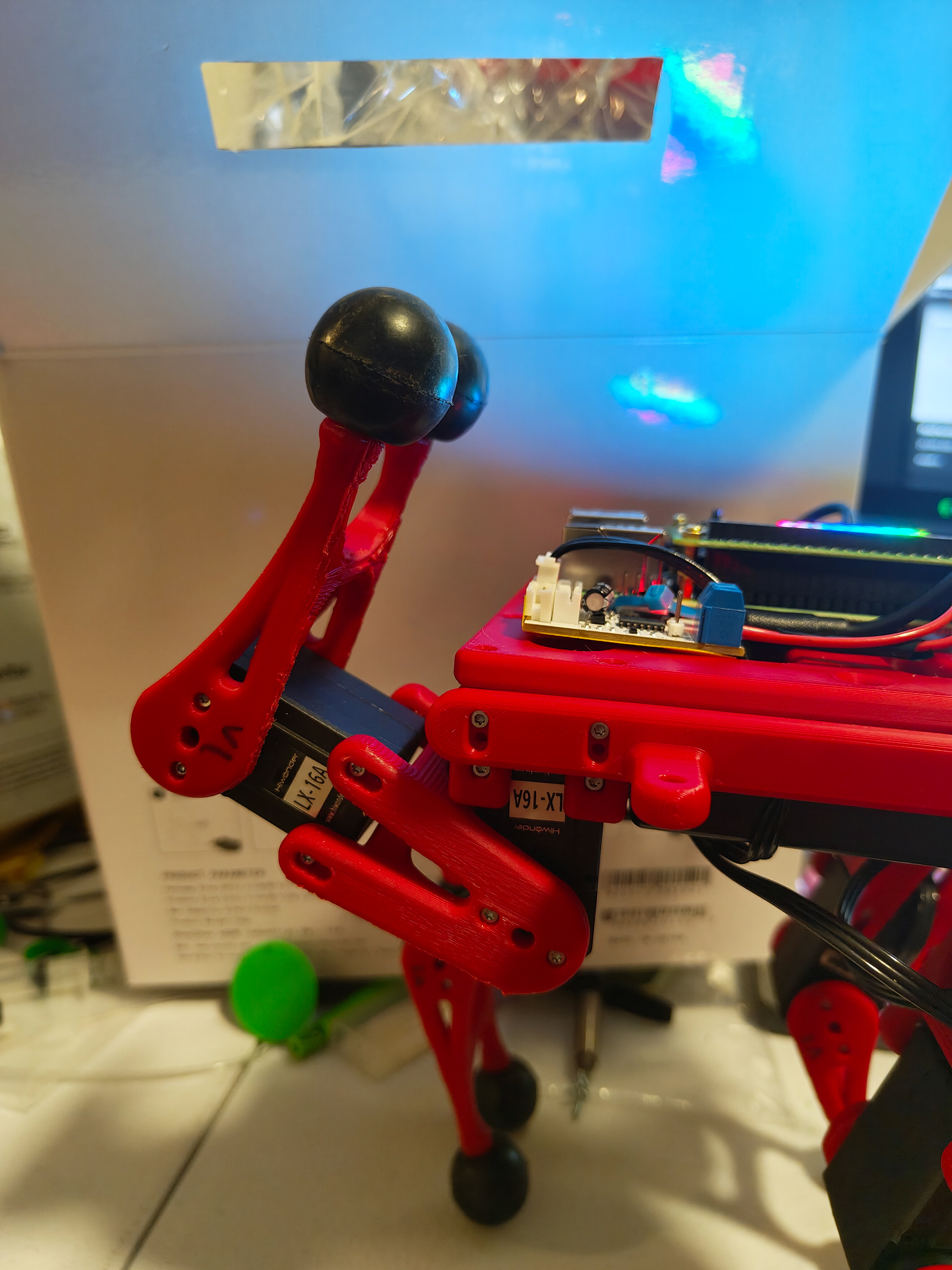
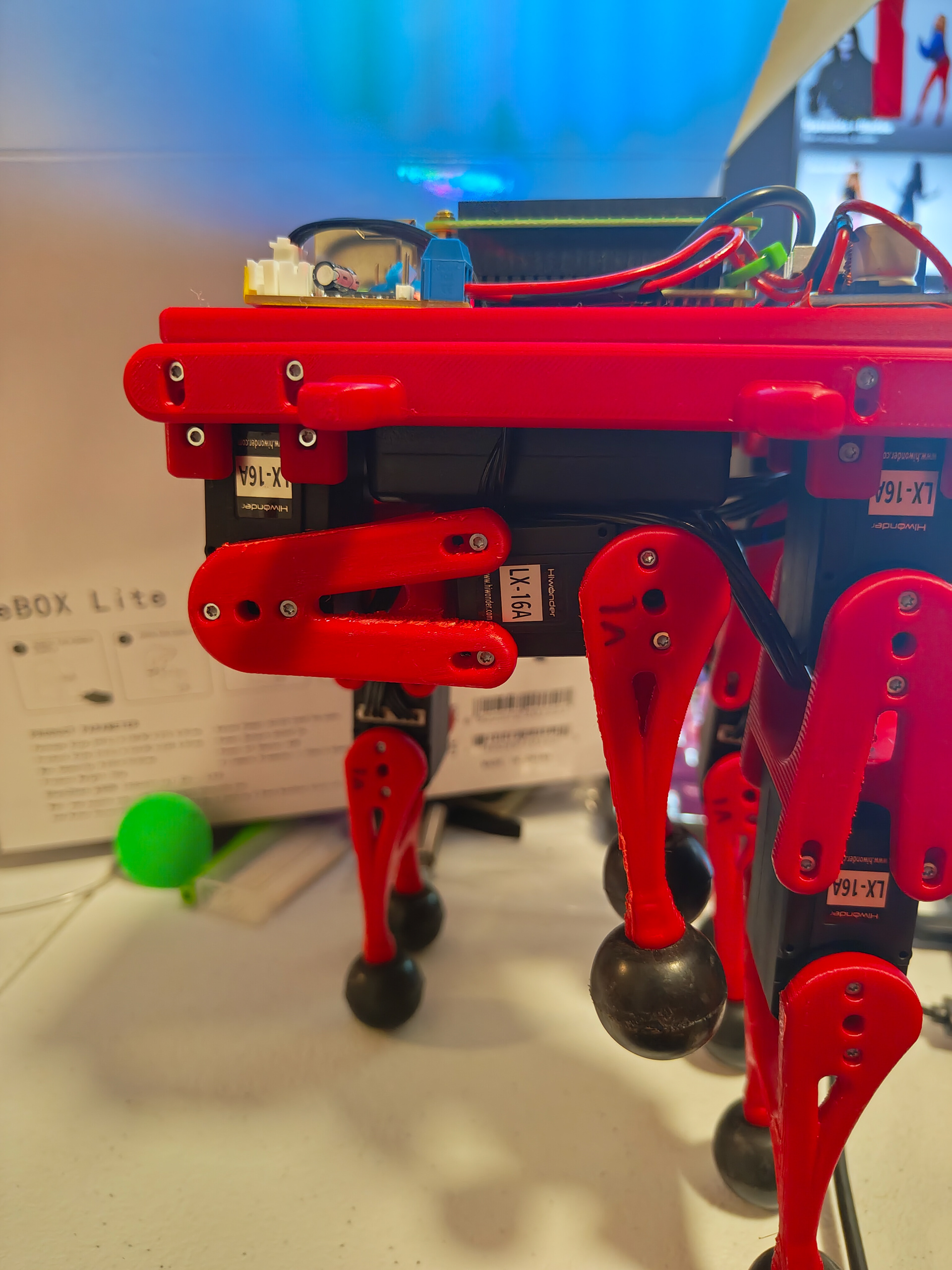
Because Clifford only has pitch movements, I gave each leg two feet to maximize stability. When the robot moves, there will be a maximum of 2 legs on the ground at a time, so 2 feet per leg allows the robot to "cheat" by having 4 points of contact with the ground at all time. Rubber balls for traction screw directly onto the legs.
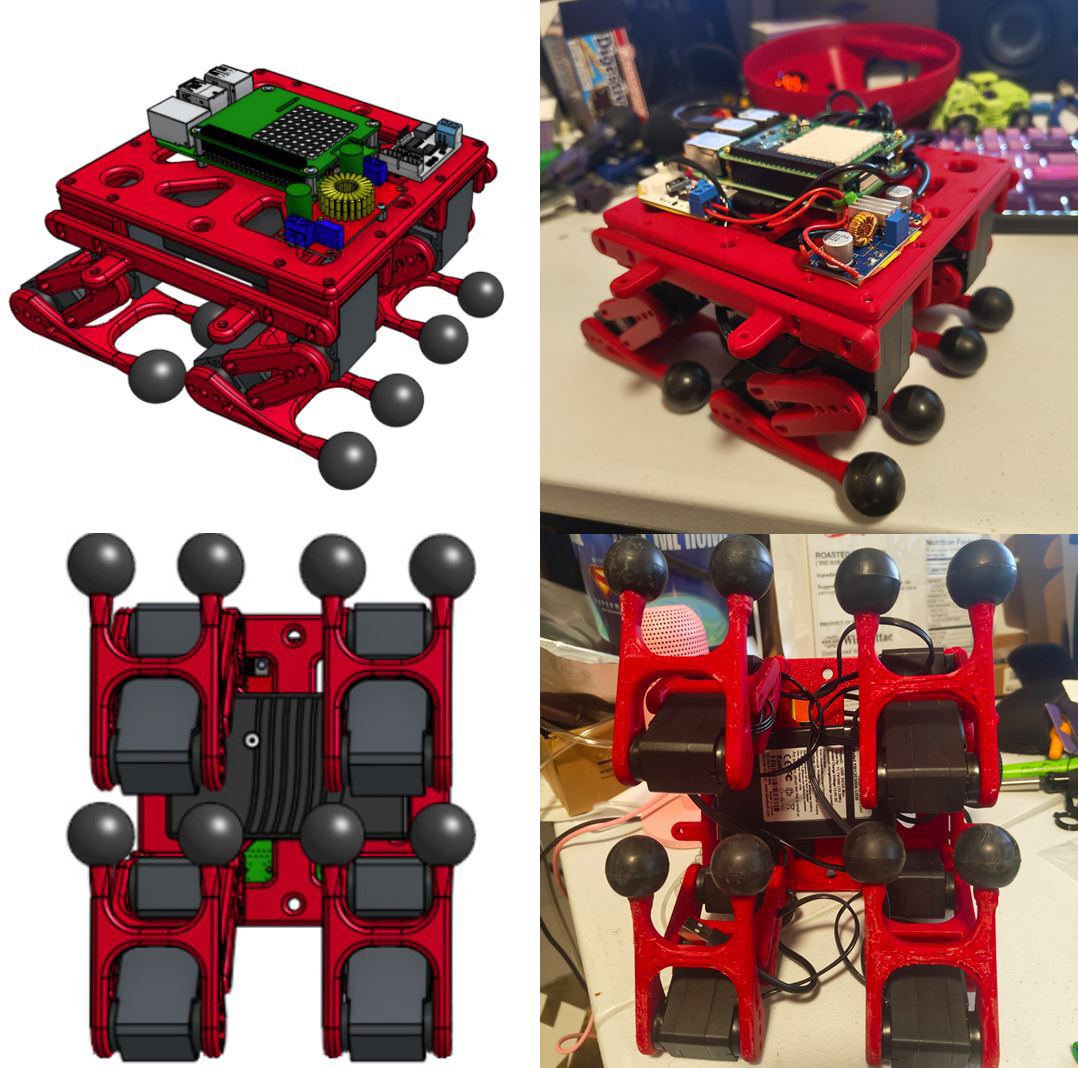
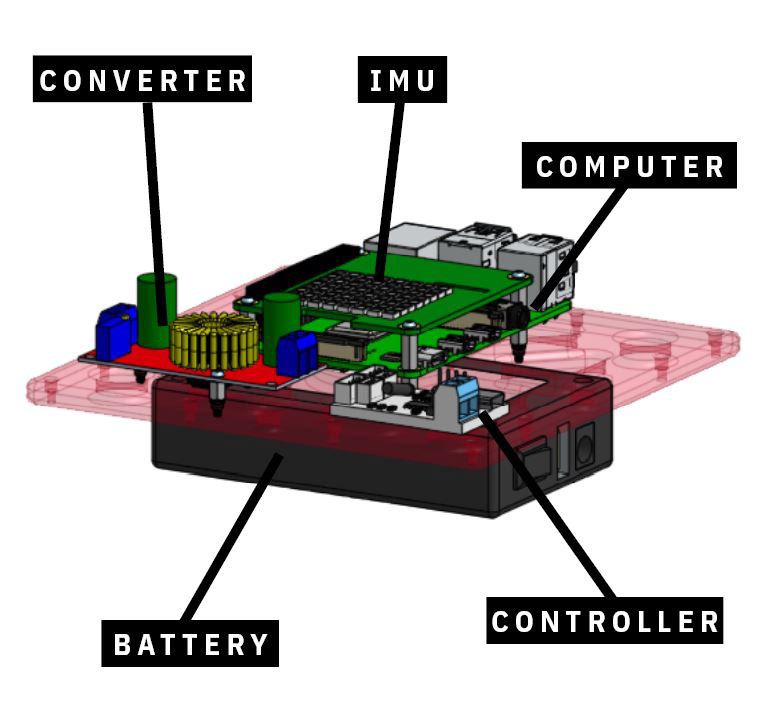
The entire structure of the robot was first made in Onshape before printing out the structure. Essentially, the robot is a sandwich of electronics with legs. The main chassis is a square board that has fragile electronics on top and the heavier battery pack on the bottom keeps the center of gravity low for stability. The legs are built separately and fixed to the bottom of the chassis. All hardware is M2 and loose parts such as wires and the battery pack are strapped down using zip ties. To keep the robot safe during transport or during falls/rolls, there is a helmet that fixes to the chassis with ventilation holes.